| 序号 | 测试项目 | 测试子项目 | 测试目的 |
| 1 | 曝光 | 曝光范围 | 测试夜晚至白天(夏天晴天中午)是否均能正确曝光 |
| 场景切换响应时间 | 测试车辆进出隧道环境亮度突变时能否快速自适应 | ||
| 2 | 颜色 | 色彩还原 | 视频中的颜色是否与实物颜色一致 |
| 颜色均匀性 | 画面内色彩分布是否均匀 | ||
| 3 | 视场角 | 水平视场角 | 行车记录仪是否满足广角及其标称值 |
| 4 | 清晰度 | MTF | 测试画面清晰度,镜头是否满足Sensor |
| 质感 | 细节纹理质感的保留能力 | ||
| 视觉分辨率 | 测试行车记录仪的视觉极限分辨率 | ||
| 5 | 噪声 | ||
| 信噪比 | 信噪比越高,则画面会更加干净和稳定,信噪比(S/N)越低,则画面会看起来很嘈杂 | ||
| 动态范围(宽容度) | 对比度(能够分辨的最亮,能够分辨的最黑),最亮为接近过曝的亮度,最黑为只剩下噪声最亮的黑 | ||
| 6 | 伪像 | 畸变 | 相对实物出现的扭曲和变形 |
| 暗角 | 画面边角部分相对中间部分下降量 | ||
| 锐化 | 照片中由锐化算法加入的比实物对比度更高的黑白边。 |
测试项目一:曝光
曝光测试包括两个测试小项:曝光范围和场景切换响应时间。
曝光范围测试指的是测试行车记录仪在各种光照环境下能否正确曝光,使用日本京立LB-8110辉度箱与LLB-1300超高亮度LED光源,模拟从LV0(照度0.4Lux,模拟夜晚环境)~LV20(45万Lux,模拟夏天晴天中午)的亮度环境,确认行车记录仪在这些环境中是否可以正确曝光。
场景切换响应时间是测试行车记录仪从明亮到昏暗和从昏暗到明亮的场景切换所需要的响应时间,场景切换响应时间越短,产品越优秀。一般来说,行车记录仪在明暗情景切换时,会短暂得出现“一片白”或者“一片黑”,这种时候是无法完成记录的工作的。而各个行车记录仪厂家的产品各不相同,场景切换响应时间也大不一样。我们使用日本京立LB-8110辉度箱 LV2档模拟隧道内昏暗环境,LV10档模拟隧道外的明亮环境,两档切换时间为0.2秒,测试行车记录仪的场景切换时的响应时间。
测试项目二:颜色
对于行车记录仪的用户来说,可能并不太关注颜色,但实际上,一旦发生事故逃逸,在没有排清车牌的情况下,交警可根据肇事逃逸车辆的车型和车身颜色快速锁定嫌疑车辆,行车记录仪能否忠实地还原色彩就显的非常重要了。
颜色测试分为两个测试小项:色彩还原和颜色均匀性。
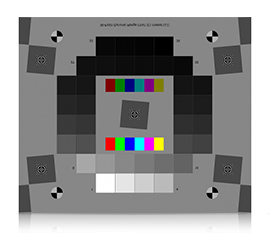
色彩还原是测试行车记录仪在各种光照环境下还原色彩的能力,在光源箱中使用行车记录仪拍摄24色卡,把拍摄到的画面输入图像质量测试软件进行对比分析,看看是否出现了偏色。

24色卡
颜色均匀性,顾名思义就是测试颜色是否均匀,通过影像质量测试软件分析各种光照环境下颜色的分布。下图是360 J501C在A光源下的颜色均匀性测试结果,可以看到颜色并不均匀,出现了色斑、色环。
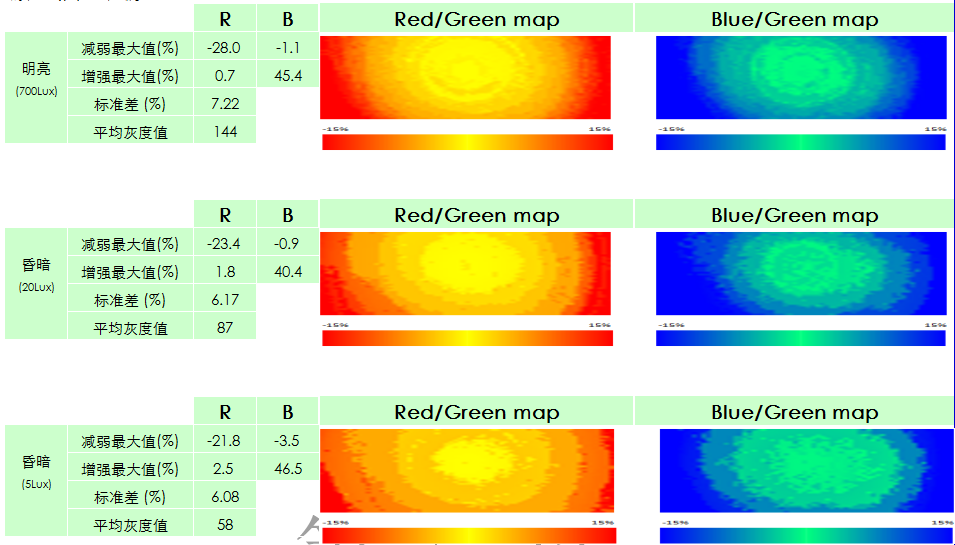
360 J501C颜色均匀性测试
测试项目三:视场角
视场角指的是行车记录仪的可视角度。很多厂商宣称其视场角时,往往会说采用镜头视场角。但镜头视场角并不等于画面视场角,因为匹配对位及校正校准的原因,Sensor对角线必定会小于镜头的像场,所以画面视场角往往会小于镜头视场角。另外对于广角镜头来说,因为畸变,角落部分挤压了过多的景物,往往无法分辨。所以,我们选用水平视场角来对各个行车记录仪进行评测。
根据以往交通事故的统计,前撞和侧撞占了所有事故的7成以上,其中侧撞占了三成,比前撞少了一成。如果去停车场转一圈,大家可以看到车头左右两侧有擦痕的车辆不在少数。
根据实测和计算,水平视场角以接近120度为佳,可覆盖整个车头,且3米远外即可全面覆盖三车道,一旦发生事故,相邻车道的车况也可一览无余。很多厂商宣称自家的行车记录仪可以覆盖三车道,其实只要视线延伸得够远,几乎所有的行车记录仪都能覆盖三车道,关键点是多远才能够覆盖,10米外就不要拿出来说了。
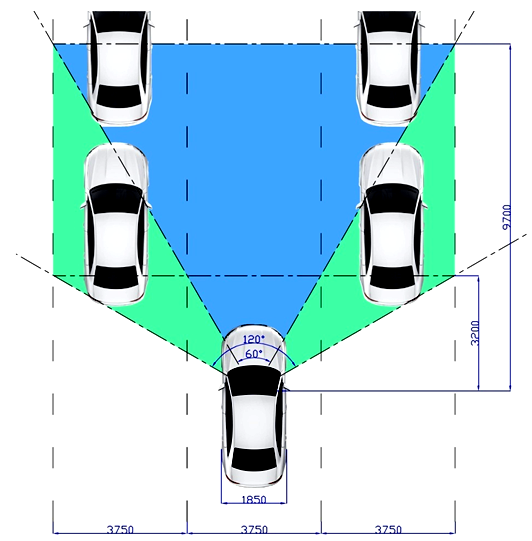
水平视场角
测试项目四:清晰度
清晰度对行车记录仪来说非常重要,拍到是否清晰能直接判定行车记录仪的优劣。行车记录仪的清晰度测试分成三个测试小项:MTF、质感和视觉分辨率。
MTF
在影像质量测试领域,MTF(调制解调函数)用来测试相机的清晰度,可以简单的认知为对比度。当黑白对比度低于10%时,人眼基本上就无法分辨,所以我们也把10%MTF称为极限分辨率。若MTF10%对应的空间频率达到0.5 Cycle/pixel,则可认定镜头分辨率已超越Sensor,则相机像素数越高,成像分辨率越高。但当MTF 10%对应的空间频率低于0.5Cycle/pixel 时,则镜头的分辨率无法满足Sensor,则相机像素高不代表成像分辨率也高,也就说会造成“浪费”。
行车记录仪的水平视场角基本在100度以上,属于广角范畴。我们采用法国DxO Analyzer的MTF 鱼眼测试模块,对行车记录仪的MTF进行测试,分别测定画面中心,上下左右四边和四个角的MTF。
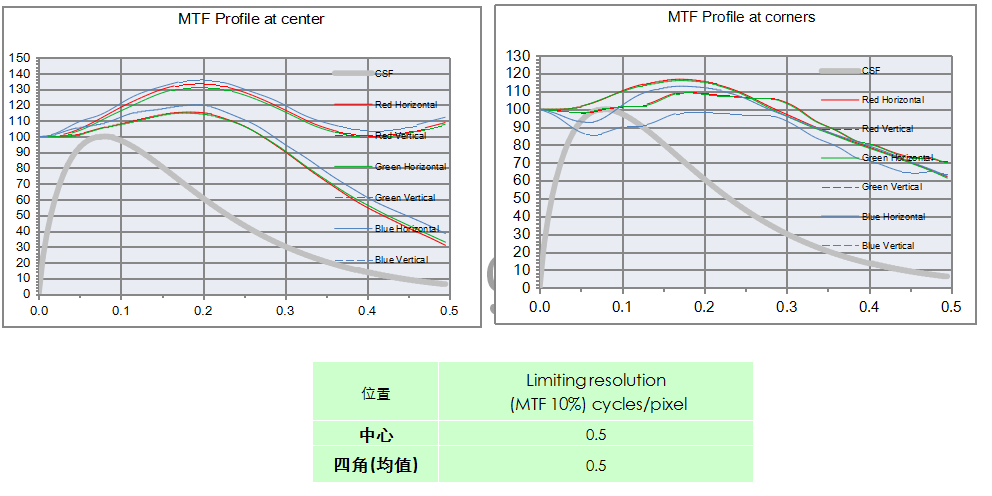
360 J501C的MTF测试
质感
质感指的是行车记录仪拍摄的纹理细节表现能力。很多行车记录仪为了提高清晰度,均使用了极强的锐化算法,相应的很多细节则保留较少。虽然轮廓清晰,但将人脸皮肤拍摄成胶皮,将树冠拍摄成一团绿,这样的成像缺少细部层次感和质感。
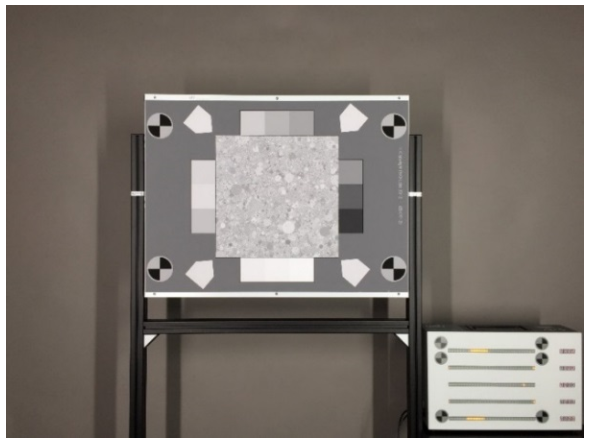
纹理测试卡(落叶图)是专门测试成像纹理质感的工具,我们用它来对行车记录仪的成像质感保留程度进行测试。
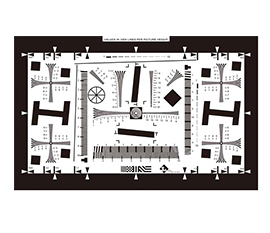
视觉分辨率
ISO12233视觉分辨率测试卡主要测试相机能够拍摄到的最细的黑白线对,单位为LW/PH(line Width per Height,线宽每像高)。视觉分辨率越高,就能够看清更细的黑白线对。当然,高清1080P高度方向只有1080线,所以,对于高清视频来说,理论上的最大值是1080LW/PH。
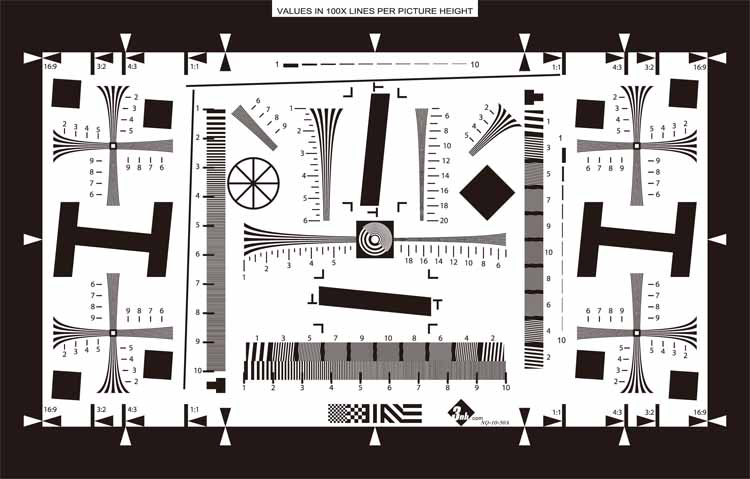
但是由于畸变的原因,相同大小的物体出现在画面不同位置时,在画面中的大小是不一致的,对于广角来说,画面中心往往会比在画面四角大很多,所以,我们会看到画面中心的视觉分辨率会超过1080LW/PH,但相应的四角就会差更多。
行车记录仪一般为超广角,其对焦距离一般设置在2米以外,所以如果要测试视觉分辨率,测试卡一定会非常大。
测试项目五:噪声
在图像质量测试里,噪声是在图像采集转化的过程中,随机加入的非线性的伪信号,如果噪声较大,就会覆盖正常的信号,从而无法正确的还原真实的场景信息。行车记录仪的噪声测试分为两个测试小项:信噪比和动态范围。
空间噪声我们使用信噪比(S/N)来衡量,信噪比越高,则画面会更加干净和稳定,信噪比(S/N)越低,则画面会看起来很嘈杂,视频中比较明显的就会有局部的闪动,更加极端的话,就是坏点、热点,导致其不会对场景变化做出响应。信噪比的单位为dB, 信噪比的典型值为36~45db,高于45dB,则画面干净,基本察觉不到噪声;若低于36dB,则就有明显可感知的噪声,画面看起来较为嘈杂。
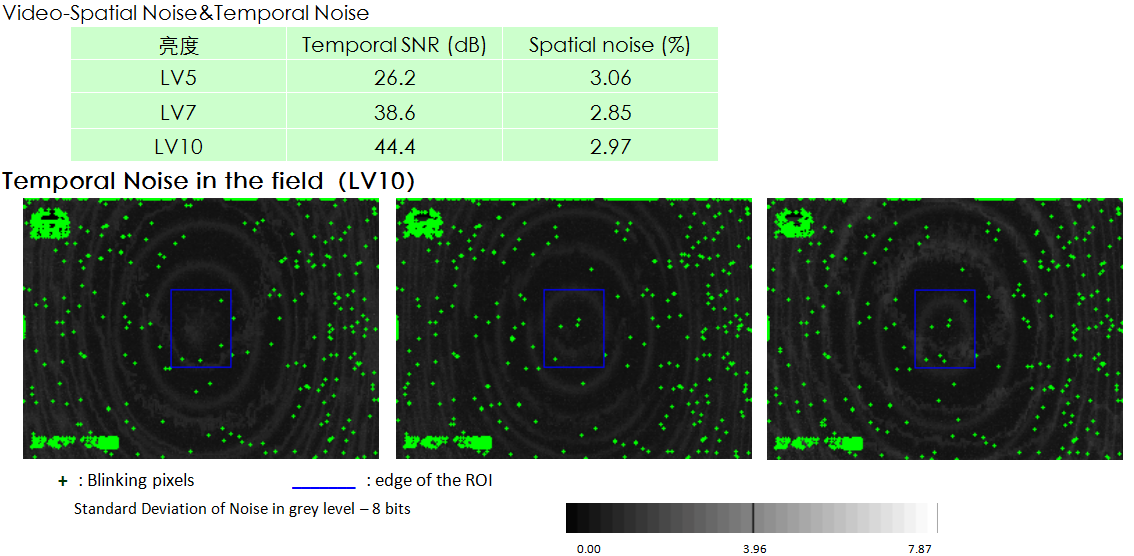
360 J501C信噪比测试
动态范围是指行车记录仪能记录原稿的色调范围,即从最黑到最亮时,行车记录仪可以分辨的最高亮度与最低亮度的比值。动态范围越大,能采集到的明暗范围会更宽广,其所能表现的层次越丰富。一般来说,若不做特殊处理,动态范围一般在8个Ev,也就是256左右,而加了HDR算法等,则可容纳更多明暗对比。
测试项目六:伪像
伪像指的是图像发生不符合真实情况的变化,包括畸变、锐化和暗角。
畸变
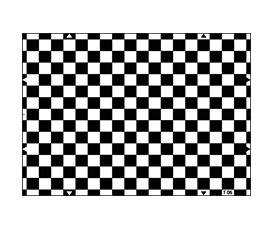
畸变是照片和视频中物体相对实物本身出现的扭曲和变形,可分为桶形畸变和枕形畸变。对于广角来说,一般都是桶形畸变。我们测试行车记录仪的TV Distortion来分析各个行车记录仪的形变量,一般来说,视场角越大,畸变越大。
如下图,水平视场角同为118度,但惠普F520的畸变明显比GoPro Hero4大很多,其中心块所占的像素数更多,鼓出的效应也更明显。
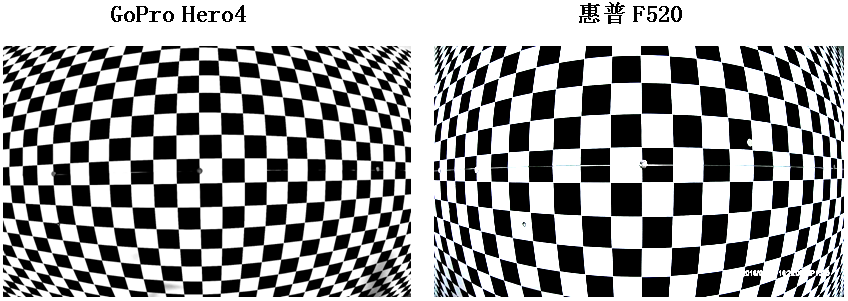
畸变测试
锐化
很多厂商会通过锐化来提升清晰度,其原理是在黑白边界由算法人工加入比实物本身更黑和更白的边,相当于重新描了一次边,适度的锐化可提升画面清晰度,而过度的锐化则会掩盖原有的边缘和层次,许多细节反而会丢失。对比360 J501和惠普F520,明显惠普F520锐化过度,如下图:
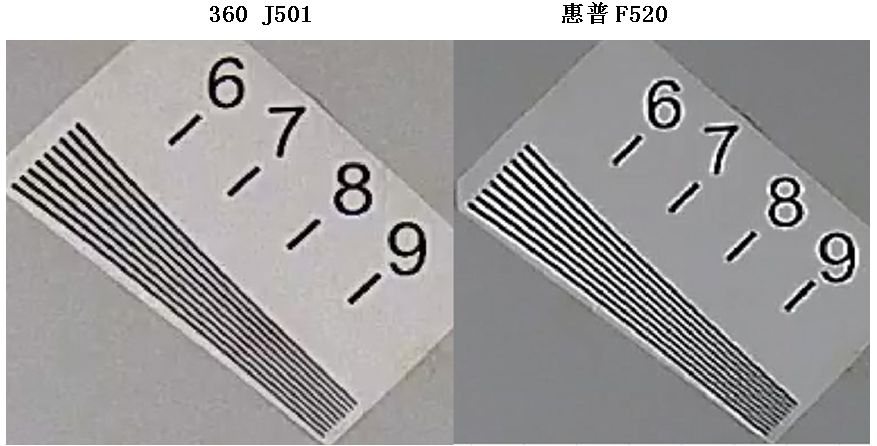
锐化测试
暗角
使用广角镜头拍出来的照片,往往画面的四角会较中心暗一些,通过测试视频画面四角相对于中心亮度下降的百分比来衡量行车记录仪的抗暗角能力。

暗角测试
总结:
以上就是行车记录仪各个测试项目的概述,提到了部分测试仪器和器材,但并不全面。如果你对这方面感兴趣,欢迎随时联系我们的销售人员,我们将竭诚为您服务!
深圳市赛麦吉图像技术有限公司致力于以先进的技术为用户提供优质的产品和服务。您可以通过电话联系我们:400-666-2522 或访问我们的官网:www.sineimage.com